はじめに
目的
FPGACardで多数のサーボモータやモータの制御、また、それらの制御回路の
SoPC(System-on-Programmable-Chip)化をはかること。
ロボットの仕様
寸法(WxDxH)
約200x600x800[mm](リ セット時)
重さ
約1.2[kg]
サーボモータの個数
9[個](MiniStudio: RB995)
モータの個数
2[個](マブチモータ:RE-260)
手足の数
足:2 手:1
自由度
足:3 手:1 腕:2
制御方法
コントローラ (SONY:DUALSHOCK2) (FPGAに接続)
電源
外部電源により5[V]DCを供給
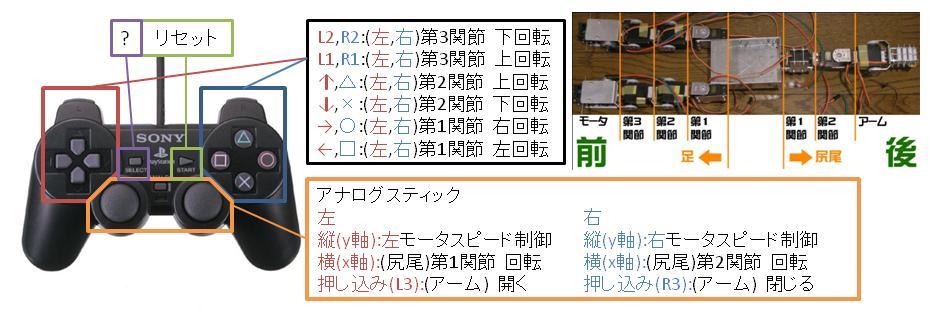
コントローラのボタン配置
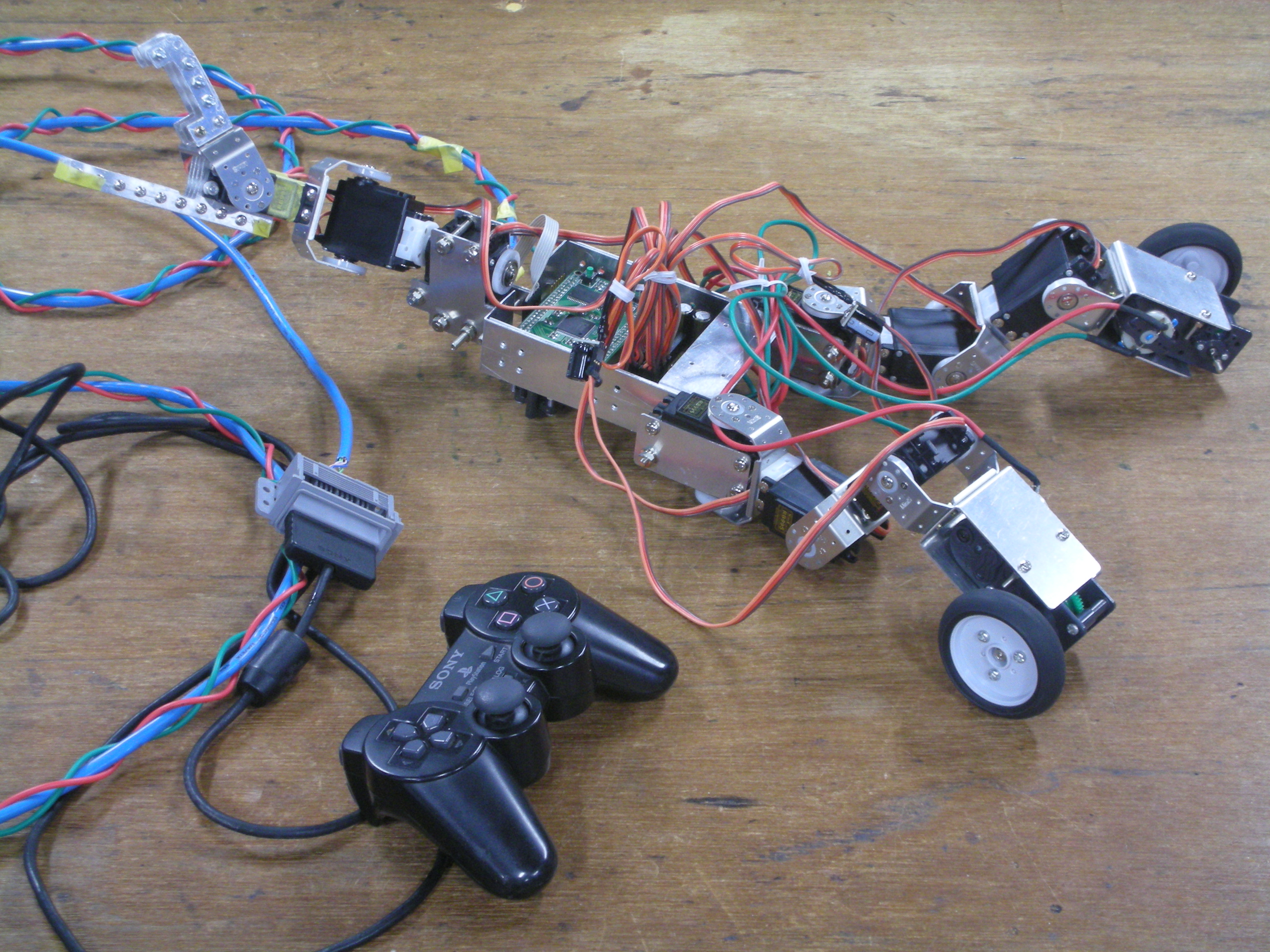
↓全体写真
考察
コントローラにより、直感的で自由な操作が可能である。
しかし、すべてのボタンに動作が割り振られているため、操作には慣れが必要である。
また、構造が丈夫なので、様々な動作に耐えることができる。
Copyright(C) 2010 Team Robosuke All rights reserved.